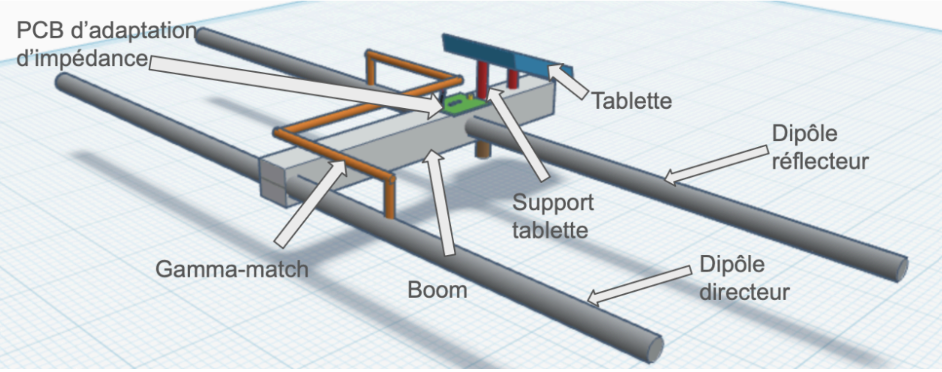
L'objectif de ce projet est de concevoir un robot mini-sumo autonome capable de détecter un adversaire et d’adapter son comportement pour le pousser hors de la zone de combat.
Le système doit respecter plusieurs contraintes, notamment en termes de coût, d’autonomie, de dimensions et de comportement imposées par le cahier des charges.
Nous nous sommes réparti les tâches au sein de l’équipe et j’ai principalement travaillé sur les parties acquisition et traitement de l’information, ainsi que sur le développement des fonctions logicielles associées. Cliquer ici pour lire la présentation de ce projet
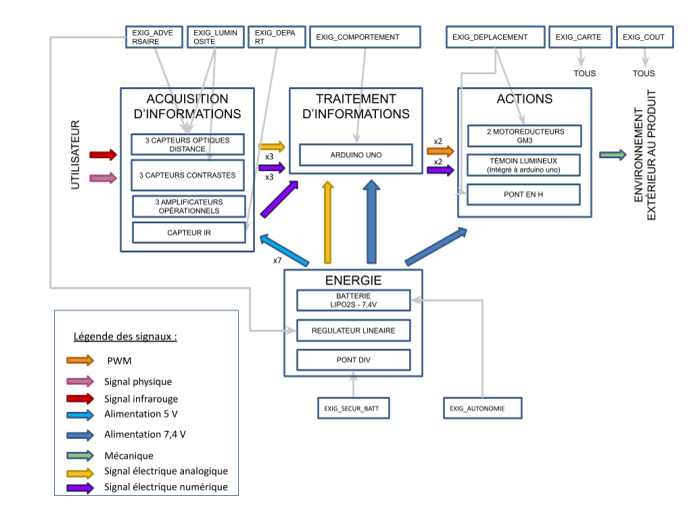
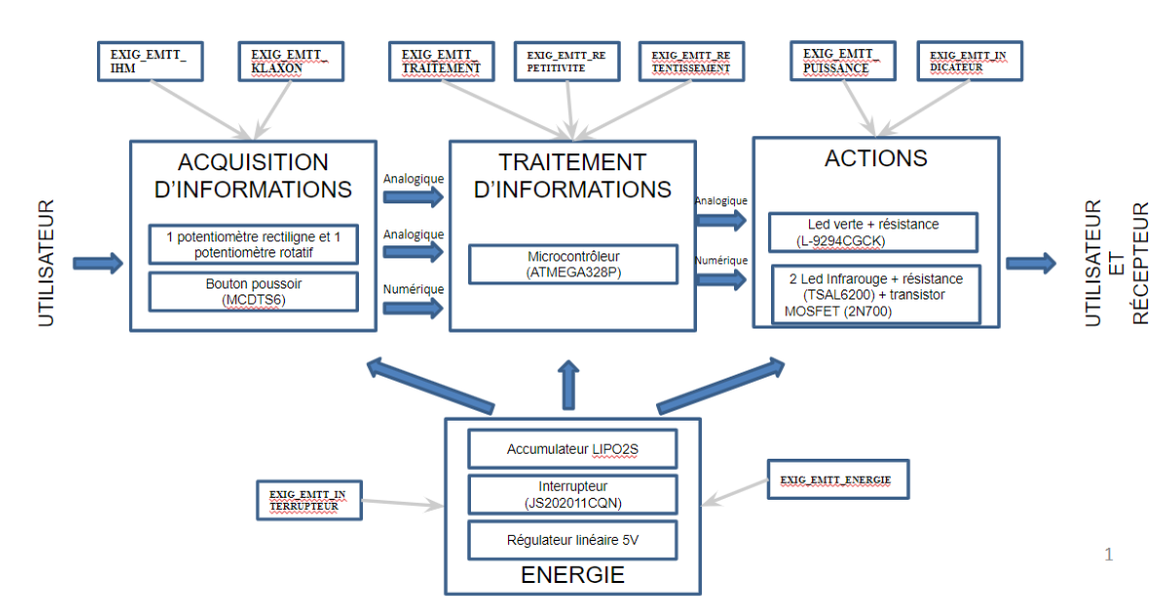
Nous avons identifié dans ce projet 4 blocs fonctionnels principaux : acquisition, traitement, action et énergie.
Le bloc Acquisition regroupe les capteurs permettant au robot de percevoir son environnement, notamment des capteurs de distance pour détecter l’adversaire et des capteurs de contraste pour repérer les limites de l’arène.
Le bloc Traitement est basé sur une carte Arduino Uno, chargée d’exploiter les données issues des capteurs et de prendre des décisions en temps réel.
Le bloc Action comprend les motoréducteurs pilotés via un pont en H, permettant d’assurer les déplacements du robot, ainsi que des éléments de signalisation.
Le bloc Energie est composé d’une batterie LiPo, d’un régulateur de tension et d’un système de mesure de la tension, assurant l’alimentation et la sécurité du robot.