Projet de SAE : Challenge De Radiogonométrie
janvier 2026 - mars 2026
Vous pouvez retrouver la description de ce projet en cliquant ici Lors de la mise au point du prototype, j'ai été amené à appliquer une opération de maintenance corrective et améliorative sur l'antenne afin de la rendre conforme aux exigences. Lors des premières mesures au VNA, la fréquence de résonance de l'antenne n'était pas centrée sur 144 MHz. J'ai donc réalisé une opération d'ajustement en réduisant progressivement la longueur des brins, puis en re-mesurant le paramètre S11 après chaque modification, jusqu'à recentrer correctement la résonance. De la même manière, l'adaptation d'impédance initiale n'était pas satisfaisante (S11 trop élevé). J'ai appliqué une correction en implantant un composant d'adaptation (capacité) sur la carte, ce qui a permis d'abaisser le S11 sous -10 dB. Cette démarche itérative d'intervention sur un système déjà fabriqué illustre une opération de maintenance permettant de rétablir et d'améliorer les performances attendues.
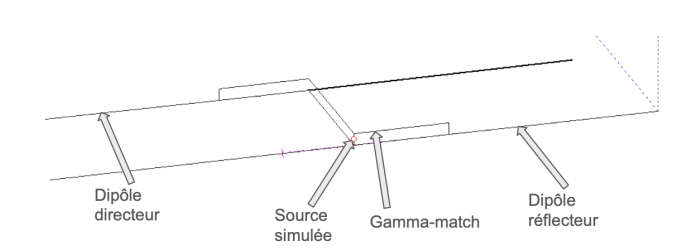
Modèle de l'antenne servant de référence pour l'ajustement de la longueur des brins