Projet de SAE : Challenge De Radiogonométrie
janvier 2026 - mars 2026
Synoptique architecture électronique de l'antenne
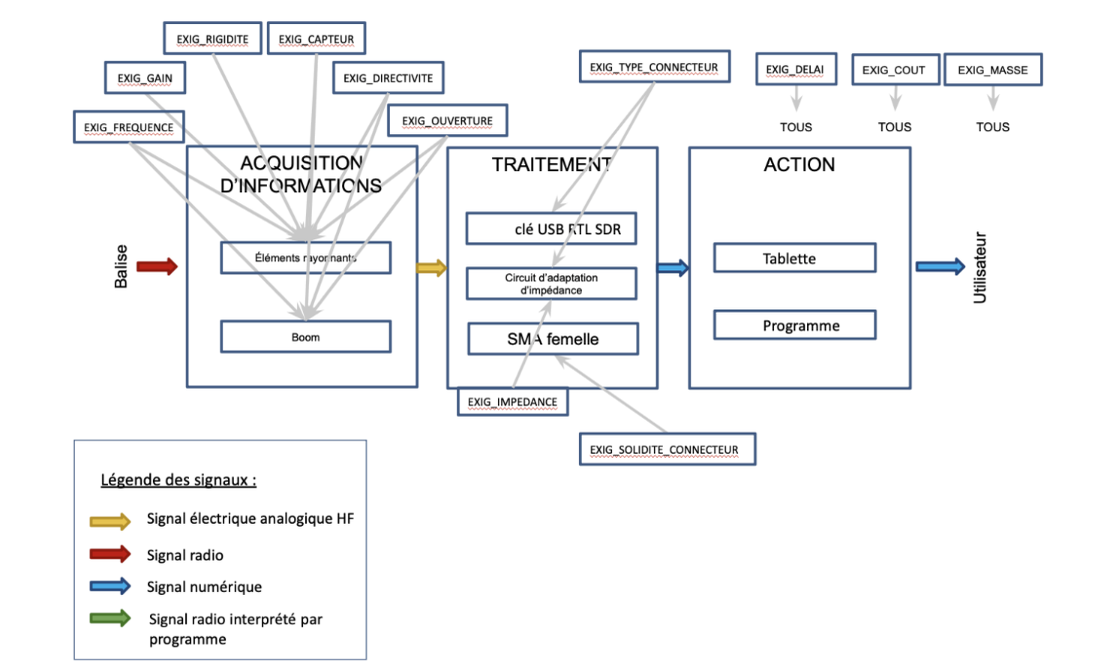
L'objectif de ce projet est de concevoir une chaîne de réception radio permettant de capter, traiter et exploiter un signal RF issu d’une balise. Le système doit respecter plusieurs contraintes, notamment en termes de coût, de délai et de masse. Le budget alloué pour la partie matérielle est de 50 € (hors tablette). Nous nous sommes réparti les tâches au sein de l’équipe et j’ai principalement travaillé sur la partie acquisition et adaptation du signal RF. Cliquer ici pour lire la présentation de ce projet Nous avons identifié dans ce projet 3 blocs fonctionnels principaux : acquisition, traitement et action. Le bloc Acquisition comprend les éléments rayonnants ainsi que le système de réception du signal radio, permettant de capter les informations émises par la balise. Le bloc Traitement est composé d’une clé USB RTL-SDR ainsi que d’un circuit d’adaptation d’impédance et d’un connecteur SMA, permettant de convertir et exploiter le signal RF en données numériques. Le bloc Action correspond à l’exploitation des données via un programme exécuté sur une tablette, permettant à l’utilisateur d’interpréter les informations reçues.