Projet de SAE : Challenge De Radiogonométrie
janvier 2026 - mars 2026
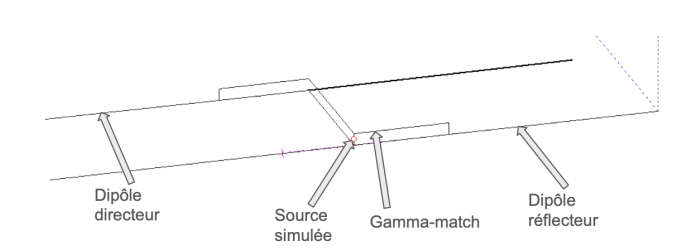
Simulation de l'antenne réalisée sous le logiciel MMANA-GAL
Vous pouvez retrouver la description de ce projet en cliquant ici Lors de ce projet, j’ai réalisé une phase de dérisquage en m’appuyant sur une simulation de l’antenne sous le logiciel MMANA-GAL. Cette simulation m’a permis d’analyser les performances de l’antenne avant sa fabrication, notamment sa directivité ainsi que la bande de fréquence pour laquelle elle peut être utilisée. Cette démarche m’a permis de sécuriser le développement en identifiant en amont les performances attendues de l’antenne et en ajustant si nécessaire les paramètres de conception.